揭秘视频千倍压缩背后的技术原理之预测技术
- 技术文章
随着5G的成熟和广泛商用,带宽已经越来越高,传输视频变得更加容易。设备特别是移动设备算力的提升、存储容量的提升,使得视频技术的应用越来越广泛,无论是流媒体、泛娱乐、实时通信,视频都带给了用户更加丰富的体验。
视频相关的技术,特别是视频压缩,因其专业性,深入开发的门槛较高。具体到视频实时通信场景,视频压缩技术面临更严峻的挑战,因为实时通信场景下,对时延要求非常高,对设备适配的要求也非常高,对带宽适应的要求也非常高,开发一款满足实时通信要求的编解码器,难度也很高。之前的文章中,我们已经在《深入浅出理解视频编解码技术》一文中简要介绍了视频编解码基本框架,今天我们将深入剖析其中的预测模块,便于大家更好地理解视频编解码技术。
颜色空间
开始进入主题之前,先简单看一下视频是如何在计算机中进行表达的。视频是由一系列图片按照时间顺序排列而成,每一张图片为一帧。每一帧可以理解为一个二维矩阵,矩阵的每个元素为一个像素。一个像素通常由三个颜色进行表达,例如用RGB颜色空间表示时,每一个像素由三个颜色分量组成。每一个颜色分量用1个字节来表达,其取值范围就是0~255。编码中常用的YUV格式与之类似,这里不作展开。


02
帧内预测
视频数据被划分成方块之后,相邻的方块的像素,以及方块内的像素,颜色往往是逐渐变化的,他们之间有比较强的有相似性。这种相似性,就是空间冗余。既然存在冗余,就可以用更少的数据量来表达这样的特征。比如,先传输第一个像素的值,再传输第二个像素相对于第一个像素的变化值,这个变化值往往取值范围变小了许多,原来要8个bit来表达的像素值,可能只需要少于8个bit就足够了。同样的道理,以像素块为基本单位,也可以进行类似的“差分”操作。我们从示例图中,来更加直观地感受一下这样的相似性。
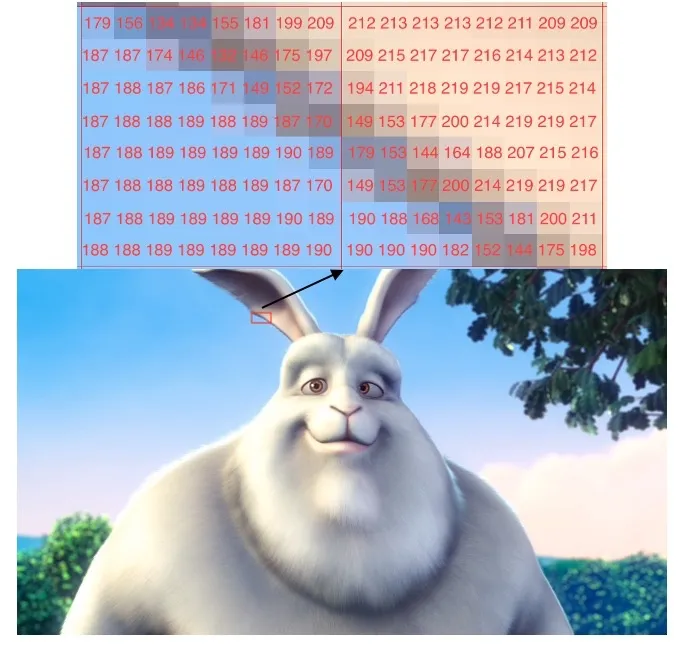
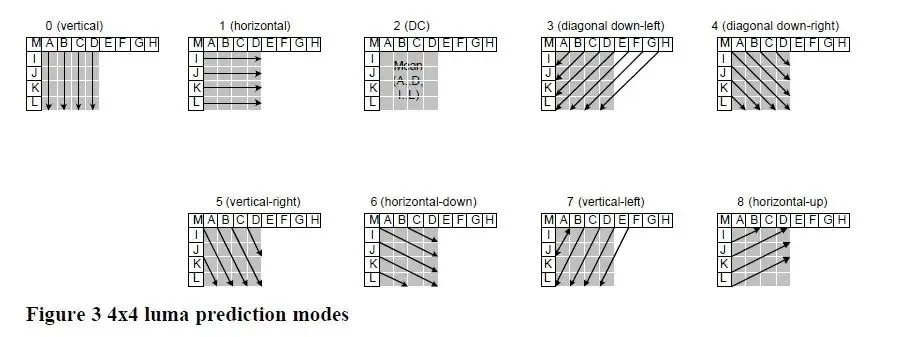
如图中所标出的两个8x8的块,其亮度分量(Y)沿着“左上到右下”的方向,具有连续性,变化不大。假如我们设计某种特定的“模式”,使其利用左边的块来“预测”右边的块,那么“原始像素”减去“预测像素”就可以减少传输所需要的数据量,同时将该“模式”写入最终的码流,解码器便可以利用左侧的块来“重建”右侧的块。极端一点讲,假如左侧的块的像素值经过一定的运算可以完全和右侧的块相同,那么编码器只要用一个“模式”的代价,传输右侧的块。当然,视频中的纹理多种多样,单一的模式很难对所有的纹理都适用,因此标准中也设计了多种多样的帧内预测模式,以充分利用像素间的相关性,达到压缩的目的。例如下图 (From Vcodex)所示的H.264中9种帧内预测方向。以模式0(竖直预测)为例,上方块的每个像素值(重建)各复制一列,得到帧内预测值。其它各种模式也采用类似的方法,不过,生成预测值的方式稍有不同。有这么多的模式,就产生了一个问题,对于一个块而言,我们应该采用哪种模式来进行编码呢?最佳的选择方式,就是遍历所有的模式进行尝试,计算其编码的所需的比特数和产生的质量损失,即率失真优化,这样明显非常复杂,因而也有很多种其它的方式来推断哪种模式更好,例如基于SATD或者边缘检测等。
帧间预测





细心地读者可能已经发现,Mario和砖块这样的物体怎么描述,才能让它仅凭运动信息就能完整地呈现出来?其实视频编码中并不需要知道运动的物体的形状,而是将整帧图像划分成像素块,每个像素块使用一个运动信息。即基于块的运动补偿。下图中红色圈出的白色箭头即编码砖块和Mario时的运动信息,它们都指向了前一帧中所在的位置。Mario和砖块都有两个箭头,说明它们都被划分在了两个块中,每一个块都有单独的运动信息。这些运动信息就是运动矢量。运动矢量有水平和竖直两个分量,代表是的一个块相对于其参考帧的位置变化。参考帧就是已经编码过的某一(多)个帧。

那么如何得到一个块的运动信息呢?最朴素的想法就是,将一个块,在其参考帧中,逐个位置进行匹配检查,匹配度最高的,就是最终的运动矢量。匹配度,常用的有SAD(Sum of Absolute Difference)、SSD(Sum of Squared Difference)等。逐个位置进行匹配度检查,即常说的全搜索运动估计,其计算复杂度可想而知是非常高的。为了加快运动估计,我们可以减少搜索的位置数,类似的有很多算法,常用的如钻石搜索、六边形搜索、非对称十字型多层次六边形格点搜索算法等。以钻石搜索为例,如图所示,以起始的蓝色点为中心的9个匹配位置,分别计算这9个位置的SAD,如果SAD最小的是中心位置,下一步搜索中心点更近的周围4个绿色点的SAD,选择其中SAD最小的位置,继续缩小范围进行搜索;如果第一步中SAD最小的点不在中心,那么以该位置为中心,增加褐色的5或者3个点,继续计算SAD,如此迭代,直到找到最佳匹配位置。

编码器在实现时,可根据实际的应用场景,对搜索算法进行选择。例如,在实时通信场景下,计算复杂度是相对有限的,运动估计模块要选择计算量较小的算法,以平衡复杂度和编码效率。当然,运动估计与运动补偿的复杂度还与块的大小,参考帧的个数,亚像素的计算等有关,在此不再深入展开。
总结
 扫一扫,添加售前顾问,了解更多服务
扫一扫,添加售前顾问,了解更多服务